Правильная установка пропеллеров на квадрокоптере, теория и практика
Недавно познакомился с блоговой платформой golos. Сам я по профессии программист, но есть у меня увлечение - квадракоптеры, электроника, и другие. Соответсвенно я и собираюсь тут устроиться и вести свой мини-дневничок, где буду оставлять свои мысли, идеи на потом, чтобы не забыть. Порой нужную информацию приходится собирать на просторах интернета по крупицам, здесь же я хочу ее агрегировать для себя и последователей. Надеюсь читатель найдет себе полезную информацию из моего блога.
А сегодня в своей первой статье я расскажу о вращении пропеллеров на квадрокоптере. С данным вопросом очень часто сталкиваются новички, и я оказался не исключением. Когда начал собирать свой первый квадрокоптер, я задумался, как поставить моторы, чтобы коптер летал, а не ползал. Как и все нормальные люди я полез в гугл искать схемы, статьи. Информации много, разбросана везде, потому решил собрать все воедино в своем «блоге».
Итак начнем с теории. Смотрим на рисунок 1.
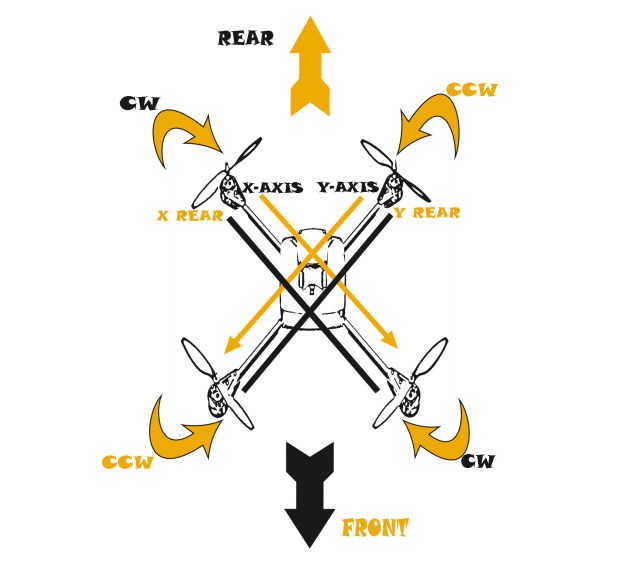
Рис.1. Схема вращения винтов на 4-моторном квадрокоптере.
Чтобы иметь правильное сбалансированное движение, вращение винтов должно быть направлено вдоль корпуса, при этом на противоположных винтах вращение должно быть направлено друг к другу внутрь, как показано на рис. 1.
Один CCW мотор должен быть расположен спереди справа, один CW спереди слева, один CW мотор должен быть впереди слева, и еще один CCW мотор должен быть сзади справа.
Вращающиеся в одну сторону двигатели должны быть расположены на противоположных осях X и Y.
Почему следует располагать моторы именно так, а не иначе?
Я расскажу сначала, почему пропеллеры имеют такую изогнутую форму и почему они поднимают коптер вверх. Для тех, кто незнаком с принципом Бернулли, открываем статью в вики и читаем — «Из закона Бернулли следует, что при уменьшении сечения потока, из-за возрастания скорости, то есть динамического давления, статическое давление падает.»
Простыми словами, быстро перемещающийся поток имеет более низкое давление, чем поток в стационарном состоянии. Это же правило действует и наоборот: например, двигающееся быстро в воде судно испытывает более низкое давление воды, чем судно неподвижное. Как это относится к летающим устройствам? Дело в том, что эффект Бернулли работает как в жидкостях, так и в газах, в нашем случае в воздухе.
Популярное заблуждение о том, что из-за изогнутого крыла сверху воздух попадает под крыло и из-за разности скорости движения потока воздуха сверху крыла и снизу возникает разница в давлении что и поднимает крыло вверх. Однако, как пишется в статье NASA это миф.
Крыло устроено таким образом, что поток воздуха под крылом замедляется и отклоняется вниз вдоль крыла, создавая более высокое давление, чем окружающее атмосферное (Pd > Pa, где Pd - давление на дне крыла, Pa - атмосферное давление)
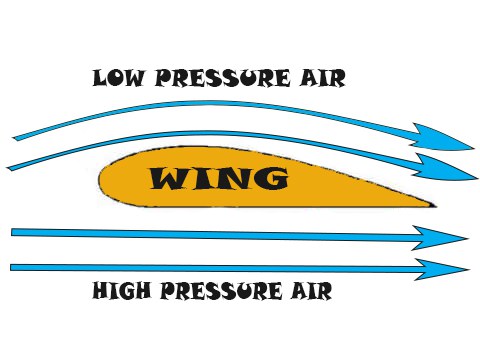
Рис. 2. Поток воздуха снизу создает разницу между атмосферным давлением и давлением под крылом.
В соответствии с Эффектом Кооанда, поток воздуха над крылом движется вдоль искривленной поверхности крыла, огибая его. Таким образом давление над крылом становится ниже над крылом по сравнению с атмосферным давлением. (Pu < Pa, где Pu — давление воздуха на крыле).
Соединив эти два факта вместе, получим, что давление воздуха на крыле ниже, чем давление воздуха под крылом.
Воздух огибает крыло сверху (как бы «прилипает») и уходит вниз в конце крыла. Воздух, проходящий снизу также уходит вниз. Эти два процесса вместе наклоняют крыло и как бы выталкивают его вверх.
Наклонить крыло можно двумя способами:
Увеличить скорость ветра вокруг крыла, например, ускоряя самолет;
Увеличивая угол атаки наклонив самолет вперед, что повернет ветер под более острым углом относительно крыла
Если махать крыльями, то это тоже будет поднимать тело в воздухе, но это тема для следующего раза.
За подъем крыла отвечает:
- Третий закон Ньютона (каждое действие имеет свое противодействие) — по этому закону крыло поднимается вверх, так как воздушная масса давит вниз и назад (крыло поднимается вверх)
- Эффект Бернулли не совсем подходит для объяснения подъема изогнутого сверху крыла, но правда в том, что разность давлений воздуха снизу и сверху крыла вместе с эффектом Кооанда поднимает крыло вверх в сторону низкого давления (вверх).
Пропеллер использует такие же принципы. Однако пропеллер толкает воздух вниз чтобы двигаться вверх (помним что пропеллер имеет изогнутую форму и вспоминаем 3 закон Ньютона):
- Масса воздуха выталкивается вниз, из-за чего пропеллер поднимается вверх;
- Разница в давлении между верхом и низом пропеллера производит подъем вверх. Вот почему воздуховод пропеллера может повысить эффективность за счет ограничения «утечки воздуха» из-за центробежной силы, которая теряется в вихре. Проще говоря, он задерживает воздух с более высоким давлением в нижней части пропеллера от перемещения вверх и пропеллер использует эту энергию для того, чтобы способствовать подъему.
Правильная установка моторов и пропеллеров на квадрокоптер
Давайте вспомним снова третий закон Ньютона в применении к вращательному движению: вращательные моменты равны по величине и противоположны по направлению, при этом тела вращаются в разных направлениях. Это означает, что если мы прикрепим один мотор с пропеллером на какое-либо тело и включим его, то пропеллер начнет вращаться в одну сторону, а тело в противоположную. Вот для чего на вертолетах устанавливают второй винт на хвост, он препятствует вращению корпуса вертолета в сторону противоположную вращению винта.
Также и с квадрокоптером: если все винты будут вращаться в одну и ту же сторону, то квадрокоптер закрутится и летать не сможет. Чтобы избежать такого эффекта, нам необходимо разместить два мотора, вращающихся в одном направлении на противоположных лучах.
Теперь вам должно быть понятно, как заставить квадракоптер «рыскать» (вращаться или поворачиваться вокруг себя): увеличиваем скорость двух моторов, вращающихся например, по часовой стрелке (CW — clockwise), относительно двух других моторов (вращающихся против часовой — CCW — counter clockwise) — поворачиваем квадрокоптер против часовой стрелки (рис. 3, фигура справа — вращение или «рысканье» — yaw).
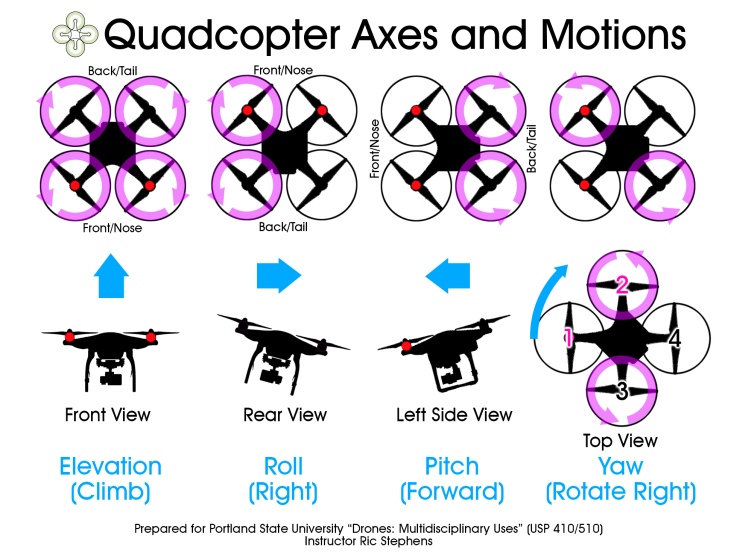
Рис. 3. От различной скорости вращения моторов относительно других зависит то, как будет вести себя дрон в воздухе.
На данном рисунке также приведено движение дрона в воздухе в зависимости от увеличения скорости вращения моторов относительно других. Советую новичкам внимательно изучить рисунок.
Заключение
На этом все! Я надеюсь, для вас все встанет на свои места, и вы со знанием дела сможете настроить вращение пропеллеров в правильном направлении. Если имеются какие-либо вопросы, не стесняйтесь, задавайте в комментариях или пишите мне.