=Академия=. Первая неделя курса «Кинематика».
У вас тоже есть привычка откладывать все в последний день? У меня есть – и я поэтому в последний день сдачи конспекта я запаслась большим количеством пончиков и кофе. Прощай фигура, здравствуй обучение!
Итак, первая лекция: Аксиомы классической механики.
Как я узнала из лекции, кинематика является основой и началом для курса механики. Следовательно, необходимо определить роль данного предмета в отношении изучения всего курса.
Начиная с 19 века, согласно проблематике Гильберта, науки начали аксиоматизировать и, механика не стала исключением из данного правила.
Аксиоматизация науки представляет собой определенно заданные наборы правил и категорий логического вывода, которые не требуют проведения экспериментов для их доказательства. Впрочем, курс будет основываться на доказательстве теорем на высоком уровне, а также практическом применении этих теорем.
Все аксиомы должны отвечать на несколько вопросов.
- Существование объектов в пространстве с определенными свойствами.
- Определение конкретного пространства для изучаемых событий.
- Правила поведения объектов.
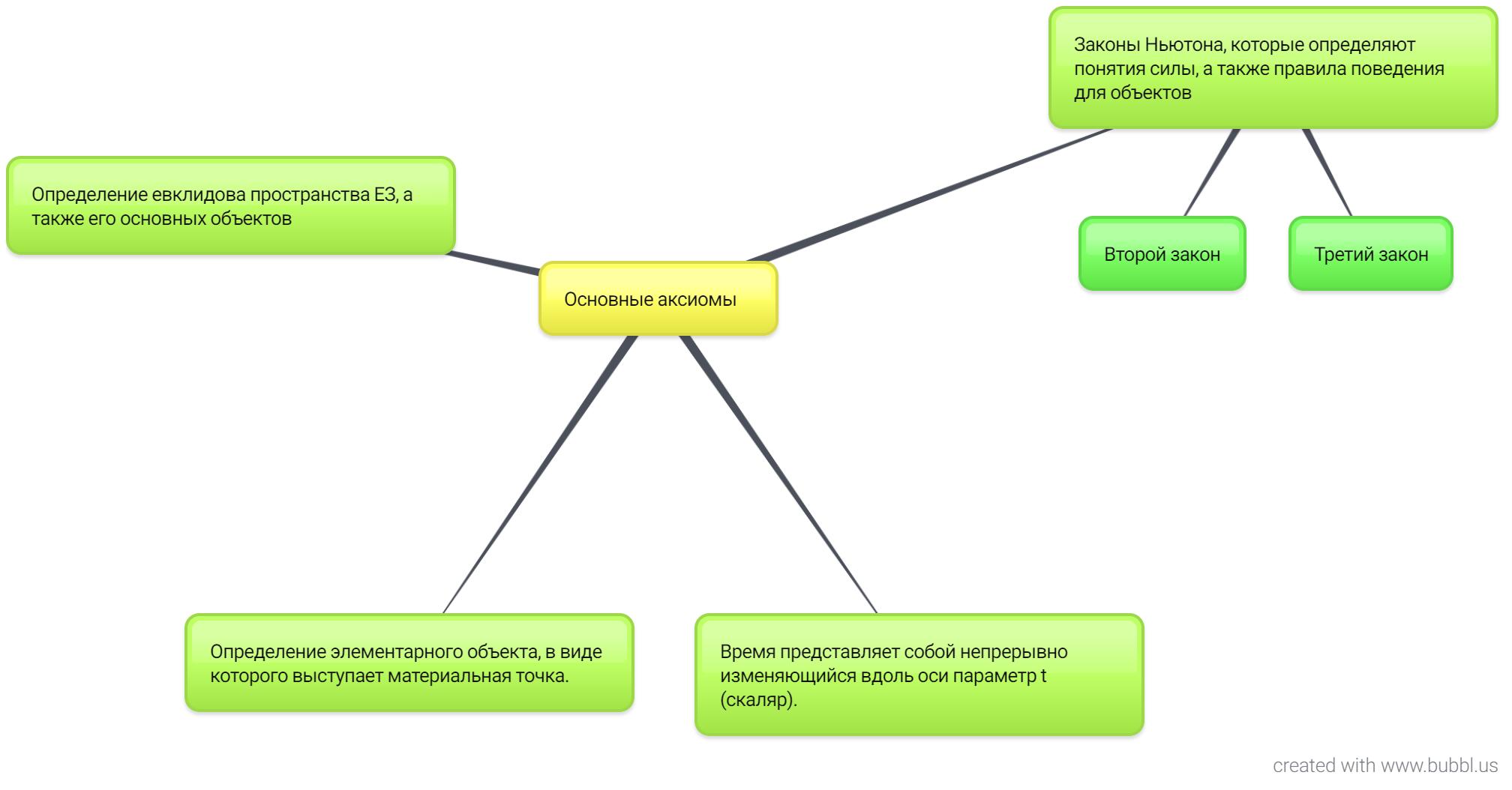
Основные аксиомы, на которых зиждется теоретическая механика:
- Определение евклидова пространства ЕЗ, а также его основных объектов. Изучение этих объектов, в том числе плоскости, точки и прямой, а также их понятий. Данные аксиомы являются частью геометрии.
- Определение элементарного объекта, в виде которого выступает материальная точка. Определение материальной точки, геометрической точка, а также пары радиуса-вектора и скаляра (массы).
- Время представляет собой непрерывно изменяющийся вдоль оси параметр t (скаляр). Данный параметр будет отображаться в виде R1→E3, согласно механике, а также представлять собой движение, более тщательно изучаемое геометрией, как частью кинематики.
- Законы Ньютона, которые определяют понятия силы, а также правила поведения для объектов:
- Второй закон – евклидовое пространство позволяет подобрать параметры t, для которых будет справедливо существование материальной точки с "mr¨=F". В данном случае F будет отображать сумму всех применяемых сил. ·
- Третий закон – каждую пару материальных точек можно выразить в виде пары векторов, следовательно, F1=−F2∥(r2−r1). При этом точки будут именоваться взаимодействующими.
Важно подчеркнуть, что точкой называют производную по времени, а парой точек – вторую производную.

Согласно второму закону и при помощи замене r˙=v, можно условно разделить уравнения на динамические, где mv˙=F и кинетические r˙=v. Кинематика будет изучить только само движение тела, а не причины, которые к этому привели.
Вторая лекция: Кинематика точки.
Начало изучение кинематики требует исследовать его самый элементарный объект – точку. При определении прямоугольной декартовой системы координат в евклидовом пространстве положение для точки будет задаваться при помощи радиуса-вектора. Также в этом случае зависимость между от времени этого радиус-вектора будет отображаться в виде пространства R1 в пространство R3.
Определения.
Закон движения представляет собой зависимость радиус-вектора r от времени либо зависимость от t всех координат точки.
Уравнения движения представляет собой дифференциальное уравнение, которое удовлетворит радиус-вектор точки r либо ее координаты x,y,z.
Траектория является кривой с движением точки. определить траекторию можно по закону движения.
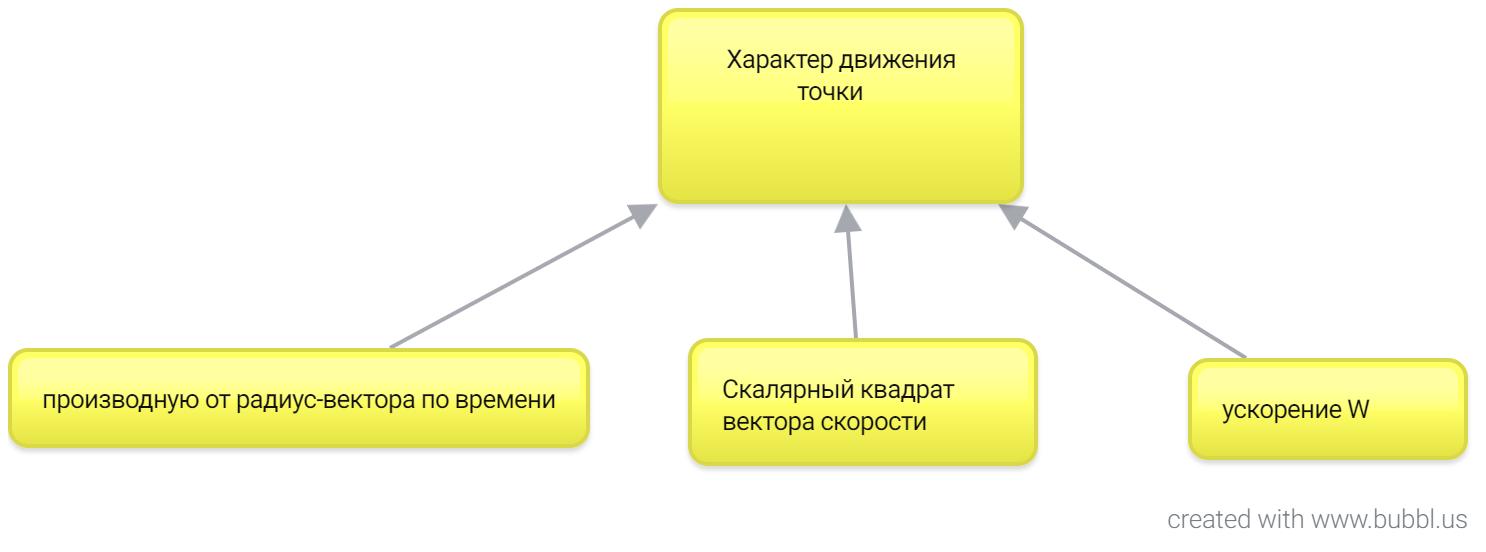
Характер движения точки по определенной траектории может быть определен на основании таких величин:
- Для определения скорости точки v необходимо найти производную от радиус-вектора по времени. Обозначение компонентов vx=x˙(t),vy=y˙(t),vz=z˙(t).
- Скалярный квадрат вектора скорости может быть выражен в формулах v=(v,v), √=vxvx+vyvy+vzvz при условии, что модуль и сам вектор скорости будут иметь единое обозначение v.
- Производная от вектора скорости по времени представляет собой ускорение W, а ее модуль имеет вид W=WxWx+WyWy+WzWz.
Кинематические уравнения.
Данное понятие сопровождает практически все разделы кинематики. В частности, определение закона движения на основании временной зависимости (если она является известной величиной) с ее скоростью позволяет найти решение для нескольких видов кинематических уравнений:
x˙=vx(t),y˙=vy(t),z˙=vz(t).
Для успешного решения кинематических задач потребуется понимание работы с векторами ускорения и скорости при изучении различных систем координат. В качестве простейшего примера такого утверждения можно изучить прямоугольную декартовую систему координат.
Что мне было интересно в этой неделе. Что сложно, что легко:
Я себя считаю уже древней теткой. Это кажется неправдой для окружающих, я и сама понимаю, что я красиво смотрюсь в зеркале – но внутреннее то ощущение не обманешь.
И вот когда я, старая тетка, начинаю вспоминать школьные науки, вроде физики или кинематики, во мне что-то просто со скрежетом меняется. Я начинаю словно делать внутреннюю зарядку. Зарядку своей личности, психике. И это удивительно.
Тяжело мне было – все. Вся эта физика далека от меня. Не могу сказать, что она мне неприятная или неинтересна. Просто оно не мое. Легко мне было работать с формулами. Они для меня ближе.
Самое удивительное для меня в этой неделе, было вспопнить, что мир имеет в себе еще и такие удивительные способы понимания его, мира, как физика.
Конспект подготовлен для Академии Голоса @academy.