Цепкая нежность
Как повторить уникальные свойства, присущие пальцам человеческой руки? Как добиться того, чтобы механический захват предмета кистью механического манипулятора был одновременно нежным, чтобы не повредить, например, хрупкую, и, в то же время, надежно удержать достаточно тяжелую вещь?
Неожиданное решение этого непростого вопроса пришло на ум к исследователям из лаборатории CSAIL (Computer Science and Artificial Intelligence Laboratory). Эти ребята из Массачусетс, наверно, большие любители оригами, ведь именно на основе этой конусообразной структуры они смогли решить поставленную перед ними задачу.
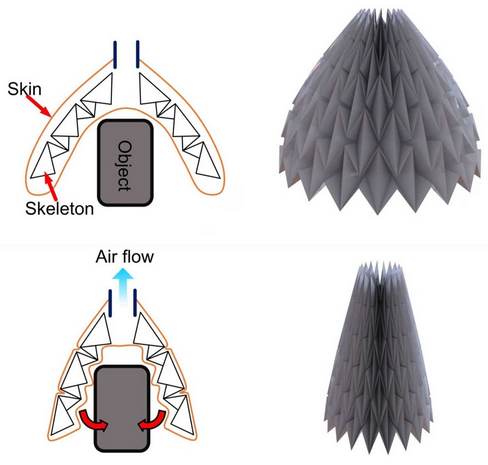
Механический захват состоит из трех частей: особой каркасной структуры на основе оригами, воздухонепроницаемой оболочки из резины и соединителя. Для того, чтобы надежно захватить какой-либо предмет из оболочки откачивается воздух, при этом каркас смыкается и надежно фиксирует "добычу".
Возможности мягкого захвата можно оценить самостоятельно, посмотрев небольшое видео.